
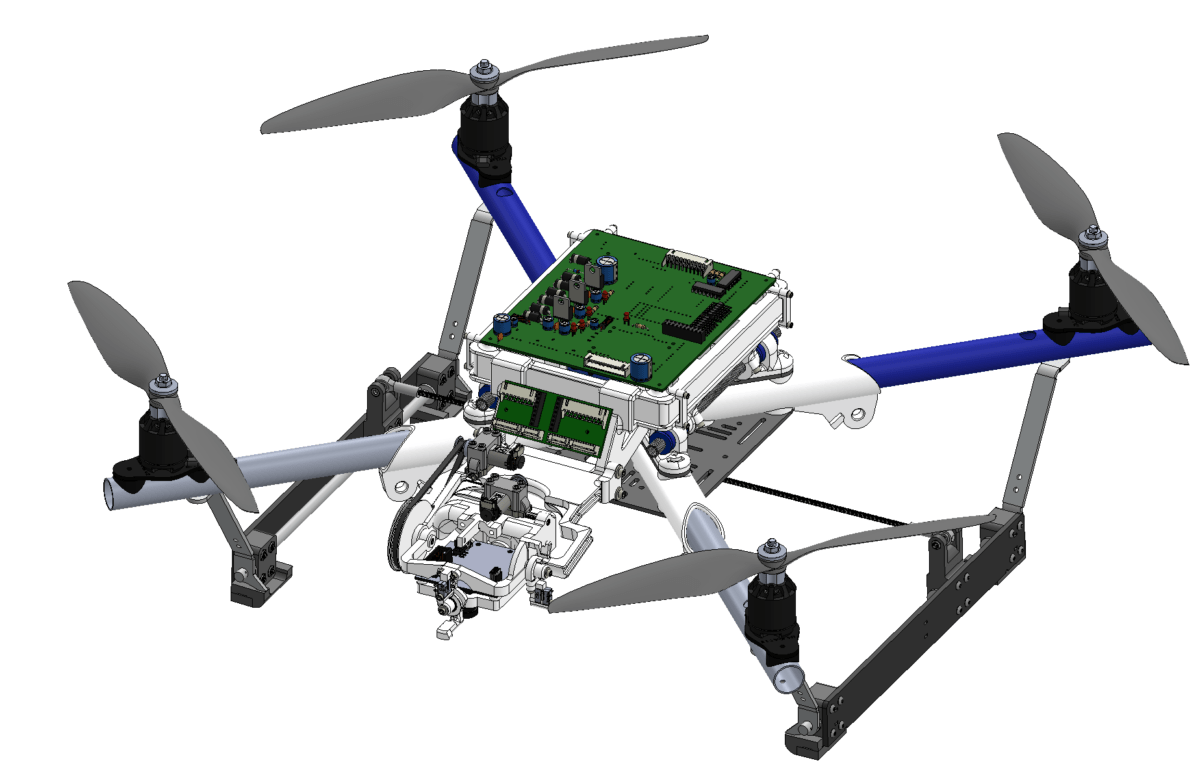
Students in Dr. Jonathan Roger’s Aerial Robotics and Experimental Automation Lab (AREAL) are using the IFL to develop a control system with the purpose of landing a quadcopter on a moving vehicle. There is an RC controlled vehicle with a landing pad and IR visual target. This ground vehicle is pursued by a quadcopter with magnetic landing gear and a gimbaled camera. In particular, this system is being developed to operate in a wide range of real-world lighting conditions. The motion capture data from the IFL has proved invaluable to the project in developing the vehicles localization filters and algorithms.

